

機器人柔順力控磨拋開源平臺
聯系電話:13720126958 / 13387619634產品簡介
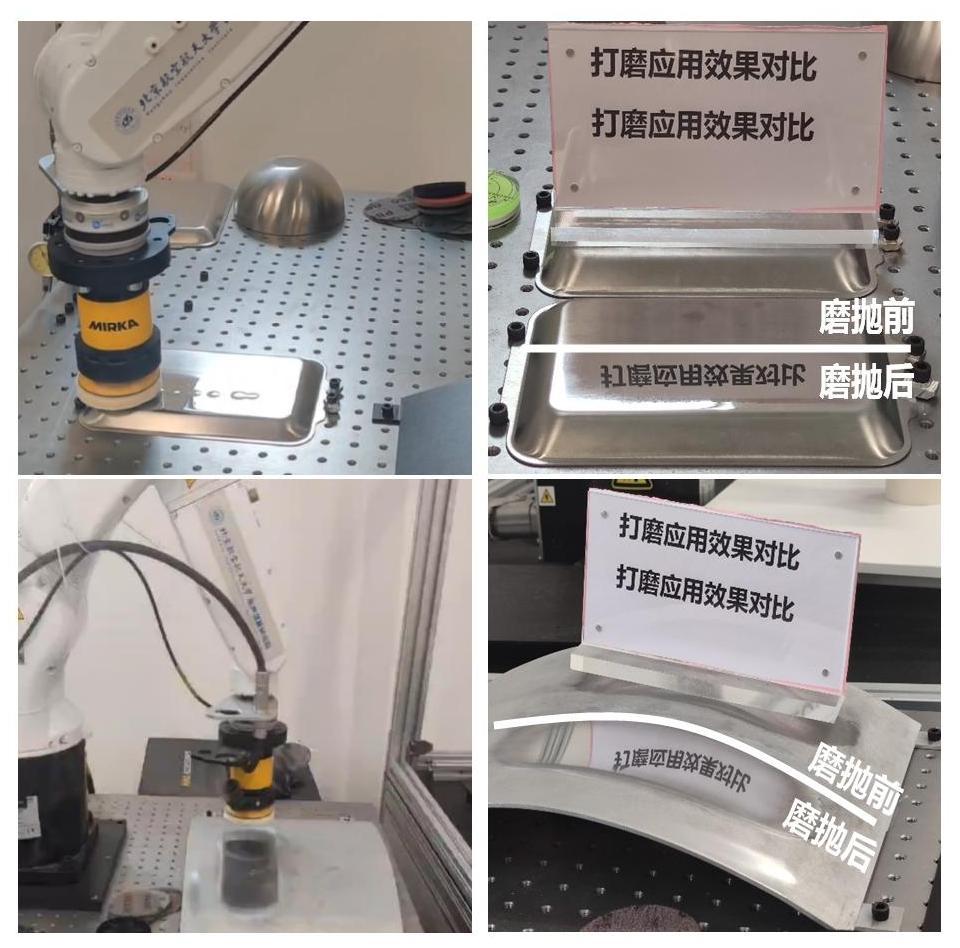
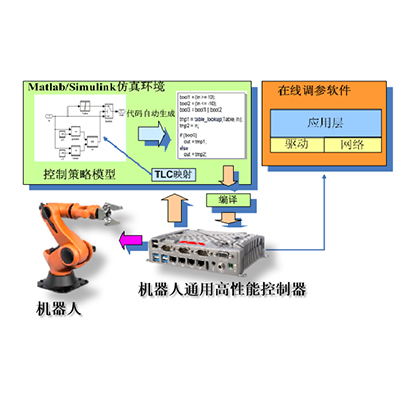
機器人柔順力控磨拋平臺內置平臺自主研發的智能通用控制器,能夠適配多種機器人架構,多款力/力矩傳感器,控制多款末端磨拋設備。控制器基于動力學轉矩辨識和前饋補償控制策略實現機器人高速高度運動控制,并進一步結合導納控制等力控策略,形成機器人力位混合控制策略,賦予機器人自主適應環境位置變化的柔順能力。本系統的重復定位精度為0.02mm,力控制精度小于10%,控制周期為1ms,能夠適應變化曲率的復雜曲面,內置多種常見材料的打磨拋光工藝參數,達到國內機器人磨拋系統的領先水平。
產品特點
PRODUCT FEATURES
1、提供機器人力控算法、機器人動力學辨識算法、機器人軌跡規劃算法
2、提供各層次c/c++二次開發接口:
提供了多類功能接口,供用戶應用或開發使用。用戶可以利用這些功能接口編寫應用程序,也可以利用SDK進行二次開發使用。具體接口詳解。功能類別如下:

3、提供各層次matlab開發模塊:

支持的研究方向
1、機器人力控制理論研究:通過研究柔順控制算法提高機器人在拋磨、去毛刺等接觸式任務的控制性能,如自適應控制、滑模控制、模糊PID控制等,以提高系統的魯棒性和作業精度。
2、機器人磨拋動力學建模與辨識方法研究:建立機器人及柔順裝置的精確動力學模型,為控制算法提供理論基礎。
3、機器人拋光工藝研究:研究和開發提高拋光效率和表面質量的工藝參數,包括路徑規劃等。
4、智能控制與機器學習算法研究:利用人工智能技術,如神經網絡、遺傳算法等,進行控制器的自適應調整和優化。
演示視頻






客戶服務電話:
027-87018711
 掃描二維碼關注我們
掃描二維碼關注我們
聯系電話:李經理 13720126958 陳經理 13387619634 郵箱:wheckert@126.com
公司地址:湖北省武漢東湖新技術開發區關東街道湯遜湖北路36號武漢理工大科技園新能源研發基地2棟08層801
版權所有 ©2019-2050 武漢艾克特科技有限公司 鄂ICP備19030040號-1